EIGRP Fundamentals
how EIGRP establishes a neighbor adjacency with other routers and how routes are exchanged with other routers.
- EIGRP overcomes the deficiencies of other distance vector routing protocols with unequal-cost load balancing, support for networks 255 hops away, and rapid convergence features.
- EIGRP uses a diffusing update algorithm (DUAL) to identify network paths and enable fast convergence using precalculated loop-free backup paths.
- EIGRP adds to the route selection algorithm logic that uses factors outside hop count.
Autonomous Systems
A router can run multiple EIGRP processes. Each process operates under the context of an autonomous system, which represents a common routing domain. Routers within the same domain use the same metric calculation formula and exchange routes only with members of the same AS. 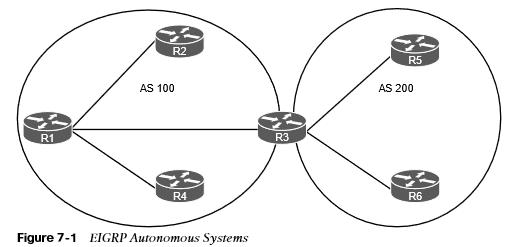
EIGRP Terminology
| Term | Definition |
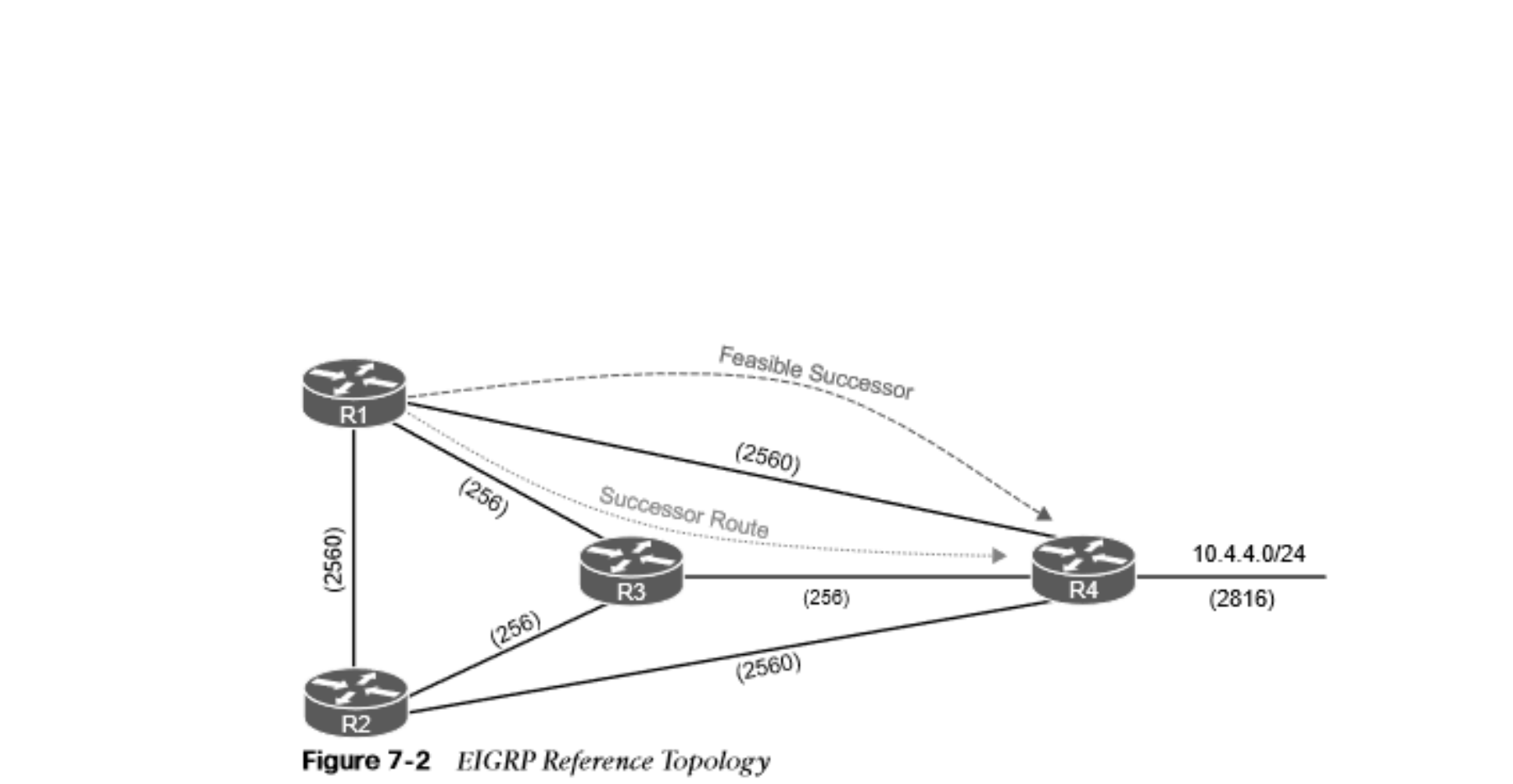
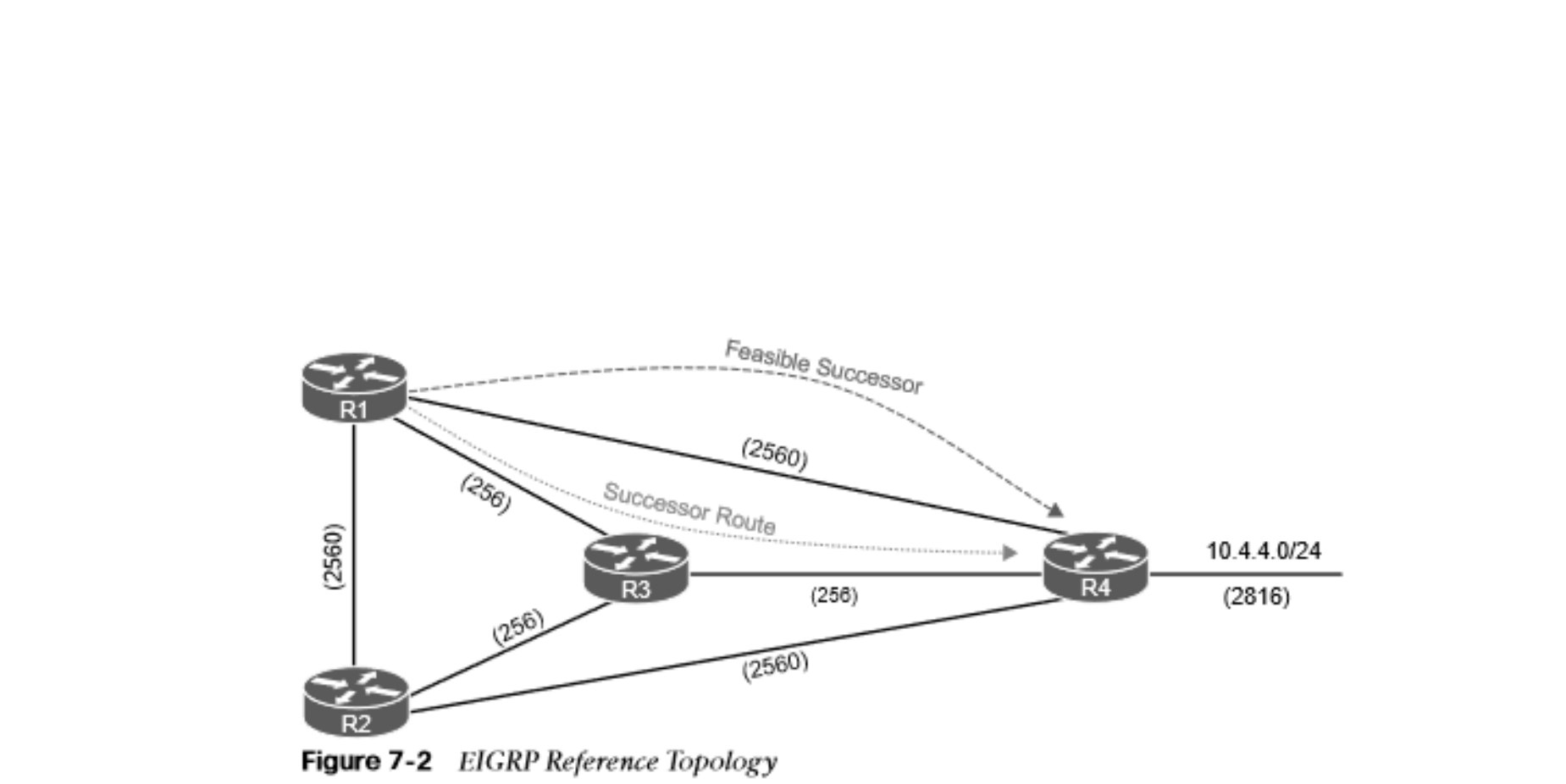
| Successor route | The route with the lowest path metric to reach a destination. The successor route for R1 to reach 10.4.4.0/24 on R4 is R1→R3→R4. |
| Successor | The first next-hop router for the successor route. The successor for 10.4.4.0/24 is R3. |
| Term | Definition |
| Feasible distance (FD) | The metric value for the lowest-metric path to reach a destination. The FD calculated by R1 for the 10.4.4.0/24 network is 3328 (that is, 256+256+2816). |
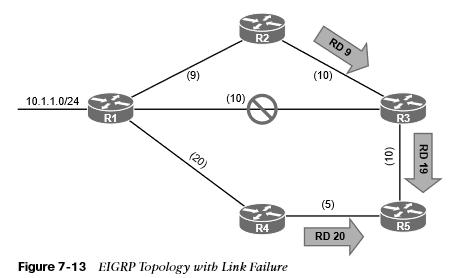
| Reported distance (RD) | The distance reported by a router to reach a prefix. The reported distance value is the feasible distance for the advertising router. R3 advertises the 10.4.4.0/24 prefix with an RD of 3072. R4 advertises the10.4.4.0/24 to R1 and R2 with an RD of 2816. |
| Term | Definition |
| Feasibility condition | A condition under which, for a route to be considered a backup route, the reported distance received for that route must be less than the feasible distancecalculated locally. This logic guarantees a loop-free path. |
| Feasibility successor | A route that satisfies the feasibility condition and is maintained as a backup route. The route R1→R4 is the feasible successor because the RD 2816 is lower thanthe FD 3328 for the R1→R3→R4 path. |
Topology Table
EIGRP contains a topology table that makes it different from a “true” distance vector routing protocol. EIGRP’s topology table is part of DUAL and helps to identify loop-free backup routes. It contains all the network prefixes advertised within an EIGRP autonomous system. Each entry in the table contains the following:
- Network prefix
- EIGRP neighbors that have advertised that prefix
- Metrics from each neighbor (for example, reported distance, hop count)
- Values used for calculating the metric (for example, load, reliability, total delay, minimum bandwidth)

EIGRP Neighbors
EIGRP neighbors exchange the entire routing table when forming an adjacency, and they advertise only incremental updates as topology changes occur within a network. EIGRP uses five different packet types to communicate with other routers.
| Type | Packet Name | Function |
| 1 | Hello | Used for discovery of EIGRP neighbors and for detecting when a neighbor is no longer available |
| 2 | Request | Used to get specific information from one or more neighbors |
| 3 | Update | Used to transmit routing and reachability information with other EIGRP neighbors |
| 4 | Query | Sent out to search for another path during convergence |
| 5 | Reply | Sent in response to a query packet |
Other useful information: